
Opened 16 months ago
Closed 16 months ago
#182 closed task (fixed)
Kalman filter implementation clarification
| Reported by: | Owned by: | stuerze | |
|---|---|---|---|
| Priority: | normal | Component: | BNC |
| Version: | Keywords: | kalman filter | |
| Cc: |
Description (last modified by )
What is the exact kalman filter implementation used in BNC? I was not able to find this exact square root filter implementation anywhere in the literature or understand it properly. The Cholesky decomposition used in combination with a QRZ Decomposition used on an Augmentation Matrix including weights, the square root of the filter covariances and a combination of the the square root of the filter covariances and Design Matrix seems unusual. A clarification would be appreciated a lot.
Attachments (2)
{kind=link}
{kind=link}
Change History (9)
comment:1 by , 16 months ago
| Description: | modified (diff) |
|---|---|
| Priority: | minor → normal |
follow-up: 3 comment:2 by , 16 months ago
In 10501/ntrip:
(The changeset message doesn't reference this ticket)
comment:3 by , 16 months ago
Replying to stoecker:
In 10501/ntrip:
(The changeset message doesn't reference this ticket)
Hello stoecker, could you clearify what you mean? The .PPP or Log Files?
I am aware of the Filter states and values in there, but I would be interested in some implementation Details regarding the Kalman filter.
e.g. the usage of computed - observed (ll) for the updated States instead of the observations here:
xx += KT.t() * (ll - AA * xx);
the computation of the transposed Kalman Gain KT. (what is YY?) SHi is the inverted Decomposed Measurement sensitivity Matrix H? y = Hx, y: observations
Matrix KT = SHi * YY;
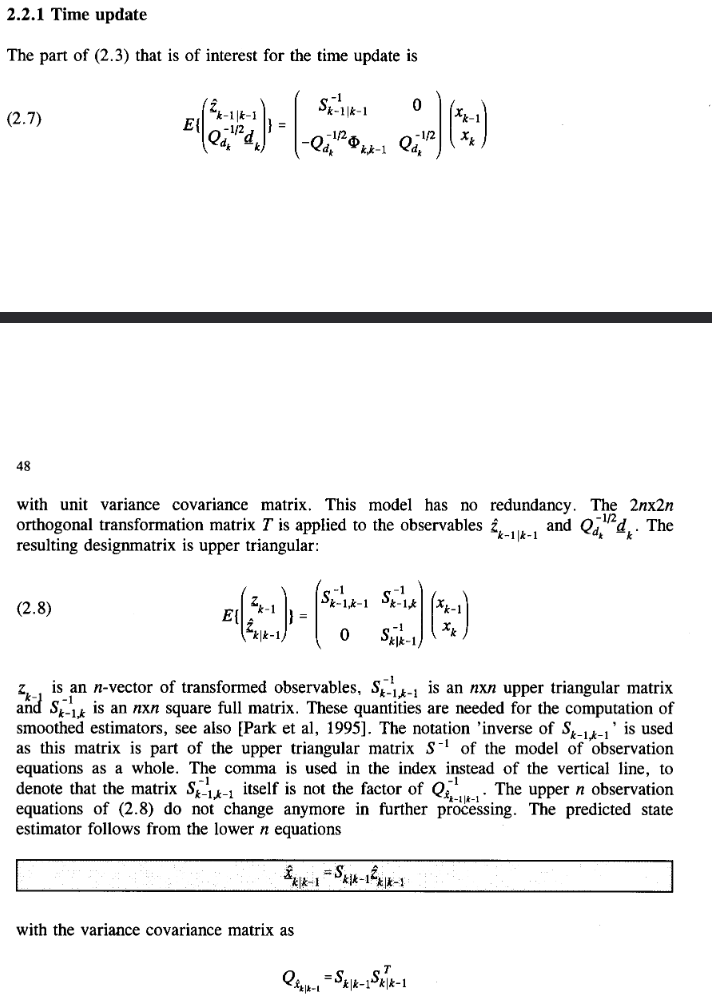
And Especially the usage of the QR Decomposition of an Augmented Matrix SRF for the measurement update. Here the closest I have gotten is in:
Tiberius 1998 Recursive Data Processing for Kinematic GPS Surveying p.47-48 (see attachment)
where it is used for the time update.
Any explanation on these topics would be appreciated.
Regards
Max
by , 16 months ago
| Attachment: | QRZ-SRF.PNG added |
|---|
Tiberius 1998 Recursive Data Processing for Kinematic GPS Surveying p.47-48
comment:5 by , 16 months ago
| Status: | new → assigned |
|---|
The square root filter was implemented by Leos Mervart and is described e.g. on page 10 of the attachment.
Best regrads, Andrea
by , 16 months ago
| Attachment: | Mervart_GW_Koll_20140127-08-10.pdf added |
|---|
comment:6 by , 16 months ago
Thank you very much for the clarification.
This helps a lot.
Regards, Max
comment:7 by , 16 months ago
| Resolution: | → fixed |
|---|---|
| Status: | assigned → closed |
A source in form of a paper name or Link would be sufficient as well.